车评网:特斯拉公布超级计算机 Dojo,为弥补自动驾驶重大缺陷?
原标题:车评网:特斯拉公布超级计算机 Dojo,为弥补自动驾驶重大缺陷?
近日在国际计算机视觉和模式识别会议(CVPR)上,特斯拉人工智能与自动驾驶视觉部门负责人安德烈·卡帕蒂(Andrej Karpathy)公布了超级计算机Dojo(发音来自日语“道场”)。特斯拉将用这台超级计算机处理车内各传感器收集的数据,然后模拟人类思维判断现实场景,基于海量数据对自动驾驶的神经网络进行训练。
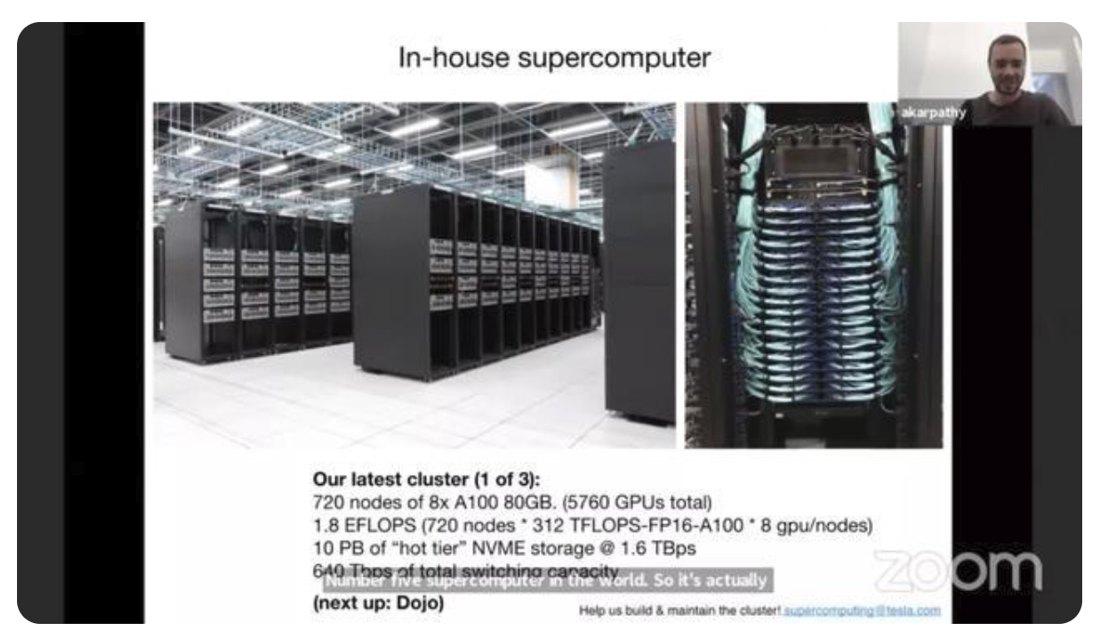
超级计算机Dojo由5760个英伟达A100显卡(算力为321TFLOPS)组成720个节点,总算力超过1.8EFLOPS。以每秒浮点运算(FLOPS)来比较,特斯拉的Dojo将超越英伟达的Selene排名世界第五。根据2020超级计算大会(SC20)的数据,超级计算机界排名第一是日本“富岳”,第二和第三分别是美国的 Summit和Sierra,第四是中国的“神威·太湖之光” 。

是不是看上去就很费钱的样子?你猜对了,特斯拉这台超级计算机的硬件成本就在1.5亿元左右:Dojo共有720个节点,而一个节点设备的价格高达20万美元(根据2021年5月英伟达芯片价格测算)。为什么特斯拉要用如此高昂的成本布局超级计算机呢?我们要从特斯拉的自动驾驶技术路线找原因。

自动驾驶技术目前有两个技术路线:一是以特斯拉为代表的视觉路线;另一种是以谷歌Waymo为代表的激光雷达路线。
视觉技术方案的优缺点优点:通过图像传感器获得的环境信息是高帧率、高分辨率的,而且成本低廉;
缺点:图像传感器是被动传感器,环境亮度会较大程度影响成像质量,在恶劣环境(例如大雾天气)下较难完成感知任务。
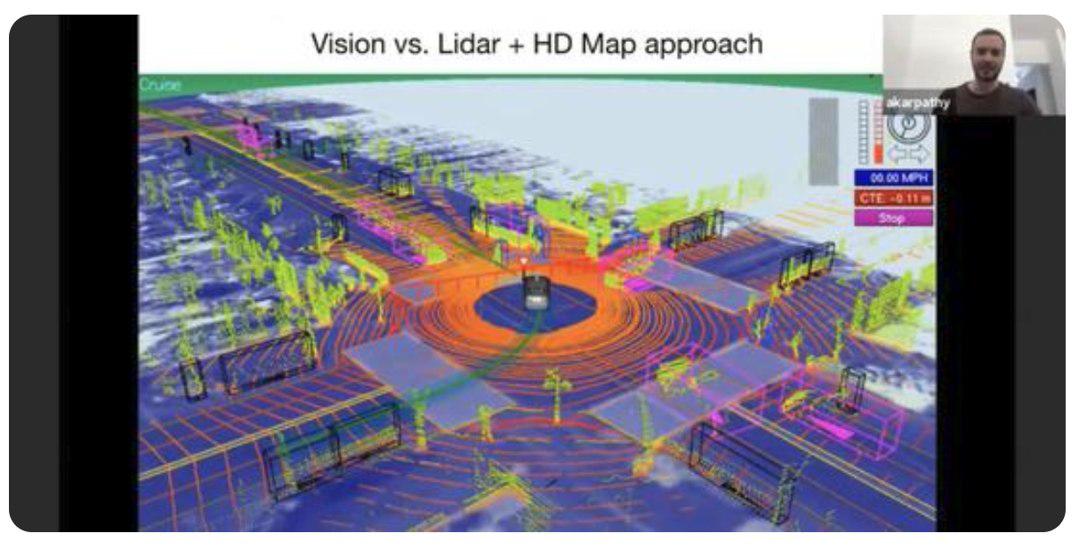
优点:由于是主动式传感器(通过发射脉冲激光来获取目标信息),范围大、精度高、抗干扰能力强;
缺点:数据难以直接利用,而且无法准确获取对象的颜色和纹理等信息,容易误判,例如一个大塑料袋飘来,摄像头能够识别然后做出继续开车的决策,而激光雷达会判断为障碍物然后停车。
看到这里,是不是涌起一个念头,这两个路线根本貌似有点互补?为什么不把两者结合起来使用,以便取长补短呢?你猜对了,自动驾驶行业多数在研究怎么融合两种技术路线,让自动驾驶的信息获取更加可靠。
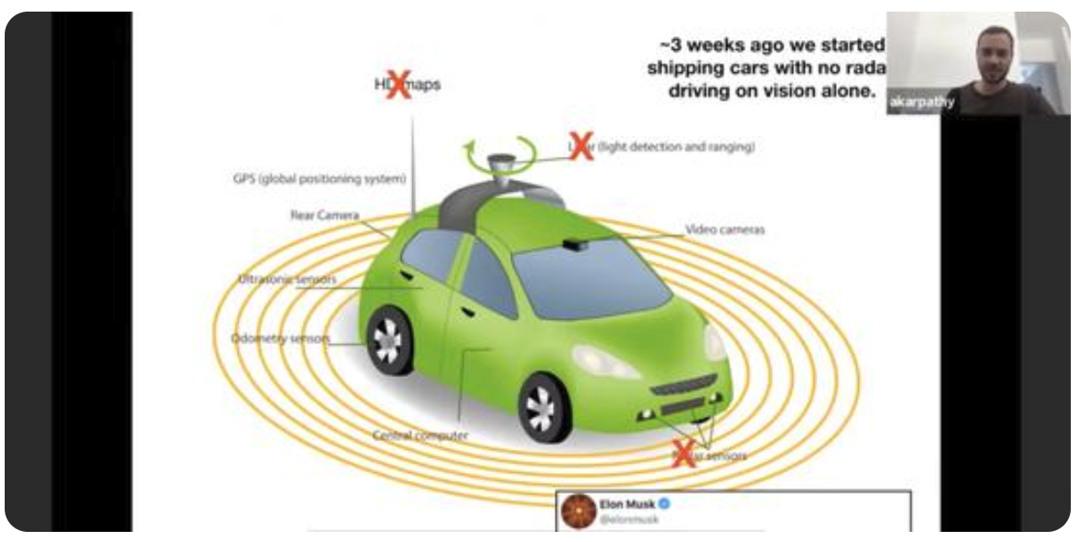
但是马斯克对激光雷达不屑一顾,他认为视觉方案要做的是突破算法的瓶颈,而不是去更换硬件。特斯拉的数次交通事故,也是因为视觉技术方案的致命缺点:二维的摄像头和现实的三维物理信息有出入,所以人眼是可以判断出的信息,摄像头却可能会出现信息失真。

马斯克对激光雷达的态度其实有两个方面原因:
一是激光雷达成本高昂,虽然随着电子行业发展有所降低,但比高清摄像头的成本依旧搞了至少一个数量级(激光雷达为几百到数千美元,而摄像头为十几到几十美元),和马斯克的成本极简理念相悖;二是特斯拉在视觉算法方面已经投入巨大,而安装激光雷达和现在的特斯拉硬件无法兼容,计算平台也需要改装,投入产出比很低。

超级计算机Dojo在这样的情况下应运而生,马斯克希望通过海量数据和庞大的计算能力去训练自动驾驶的神经网络,以改善视觉技术路线的缺陷。而其他车企其实并没有特斯拉在视觉方案上的沉没成本,如果走视觉+激光雷达路线,那么实现自动驾驶领域的弯道超车也有成功概率,不知道那时候特斯拉会不会后悔。
本文为“车评网”原创,作者:慕容排骨,未经允许不得转载。关注“车评网”,专注汽车行业深度报道




